温度というのは、あらゆる分野で使い、おそらく温度調節計やPLCといったものは案外多くの人が装置などで使用したことがあるのではないかと思います。
しかし、この温度を上げすぎずかつ、早く安定させる為のPIDという機能について何のためにあるのか、その意味を知らない人は多いのではないかと思います。
今回は技術的にではないにしても、これくらいあれば話ができるよという温度制御におけるPIDの基礎知識を説明していこうと思います。
ちなみに、温度制御全般の関連記事は下記です。
世の中には冷暖房のような温度、照明の明るさなど自動調節して調整してくれる機械が沢山あります。他には水の流れる量や圧力などもありますよね。しかし、その『調節』ってどのような制御構造でどのように行われているか知っていますか?温度制御とも[…]
これが参考になれば幸いです。
いまや個人事業主や少人数の規模の企業が集客をするにはホームページは必須です。
しかし、ホームページの作り方がわからなかったり、作れてもなかなか検索順位が上がらなかったりと、
案外ホームページの作成・集客・運営は大変なもの。
そもそもSEO(エスイーオー)対策すらわからない、知らないという人が製作しても集客は難しいでしょう。
いまよりもっと、お客さんを増やしたいとお考えならブログ代行サービスがオススメです!!
最初に綿密な打ち合わせをしたら、基本丸投げでOKなサービスです!!
インターネットという、いまや誰もが見て検索する媒体は、日本中あるいは世界中が対象です。
つまり営業一人雇うよりも安く、宣伝効果は何倍、何十倍も高いのです!
そんなwebサイトの効果的運用を目指すなら、下記ブログ代行サイトをご検討ください。
![]()
![]()
PIDってどういうもの?
さて、温度制御の基礎となるPIDという動作ですが、簡単に言えば温度を素早く目標値で安定させる動きをさせるという動作をさせるものとなります。
もちろん、温度には限りませんが便宜上温度といった方がわかりやすいでしょう。理解すると応用でなんにでも使えるようになるかと思います。
では、温度の上昇と安定の理想というのはどんな上がりだと思いますか?
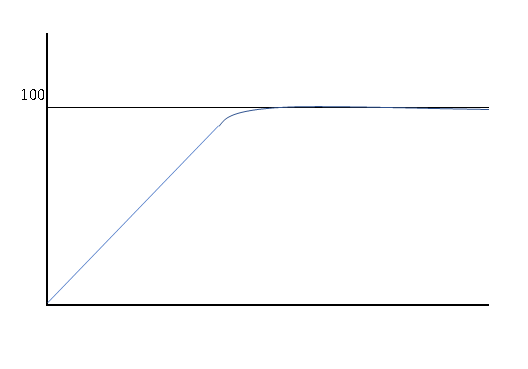
そう、仮に100℃で設定したとしてこのような形で温度が目標値付近でスッと安定するのがもっとも理想とする温度の安定方法ですよね。
しかし、残念なことにこんな理想的にうまくいくのはなかなか難しいといえます。ヒータの強さや、環境的要因などにより100℃設定なら100℃を一度も超えずに安定させるというのは理論上不可能となります。
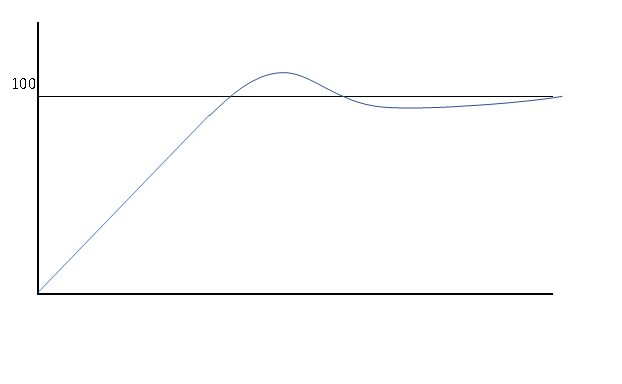
おそらく、ほとんどの装置が、最初にこのような100℃を一度超えてから安定していくようなグラフの制御になるのではないかと思います。ヒータが強いものだとしばらく波を打つかもしれません。
ちなみに、この温度設定値を超えることをオーバーシュートと呼びます。
この一度設定値を超え、下がってから徐々に安定していくという動きは基本的には変わりません。
PIDの特性上、オーバーシュートは大なり小なり必ず起きるといわれています。
もちろん、ヒータが余程弱ければオーバーシュートも少ないかもしれませんが、そもそも温度が上がりきらなくなりますし、温度が上がるのは時間がかかってしまいます。
そんな例外を除き、ヒータというのはある程度劣化を考慮して設定より高い温度まで上がるようになっているものなのですが、このオーバーシュートを極力最小限にして、できるだけ早く設定温度で安定させる目的なのがPIDというものなのです。
そして、そのPIDのそれぞれにあたるものをこの図にあてはめてみました。
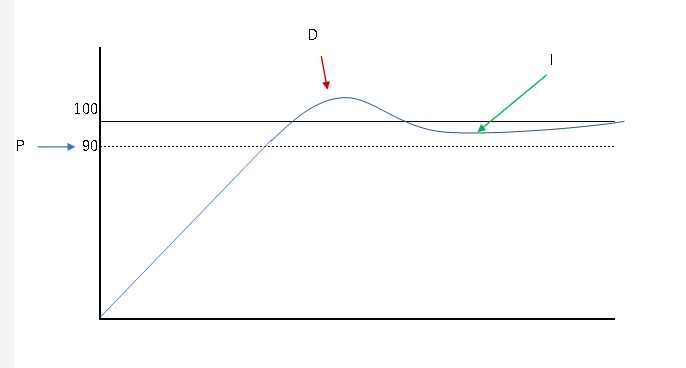
このように、PIDというのはP動作・I動作・D動作の複合からなるものでその3つを合わせたものとなります。
なので、P動作・PD動作・PI動作というものも存在するのです。
では、一つずつ解説をしていきましょう。
【P(比例帯)】
実は自動制御の中で一番なくてはならない要素となります。というのも、このP動作は比例帯と呼ばれ、制御を強める場所を設定するものなのですから。
温度制御というものは、小刻みに電源をONとOFFを繰り返すことで、温度が上がりすぎないよう下がりすぎないようにするものですが、基本的に上昇中は電源を切りませんよね?
ですので、この電源を入れたり切ったりする動きを強めるのがこのPという比例帯なんです。
図のものは90℃ですので、10℃で設定されています。これを伸ばすとどうなると思いますか?
そうすると、当然ながら制御を強める場所が早くなりますのでオーバーシュートを多少抑制することはできるかと思います。
なので、ヒータの温度の上りが早くて大きく設定値より上回ってしまう可能性が高い時は範囲を広げてやるのが有用かと思います。
ただし、その分安定まで時間がかかってしまうのがデメリットとなります。
【I(積分)】
Iは積分と呼ばれ、基本的にはオーバーシュートした後に落ちてきた値を設定値まで安定して上昇させる動きをするものになります。
一般的には『秒』と時間であらわされ、落ちてきた設定値付近の温度を何秒で安定させる動きにしろというものとなります。
ただし、ヒータの性能により短すぎると安定せず、長すぎると安定まで時間がかかってしまうという実に素人がいじるには難しい設定となります。
ですので、あまりうかつにいじらない方がいい設定機能となります。
【D(微分)】
Dは微分と呼ばれ、基本的にはオーバーシュートを抑制する為の動作となります。
これもまた、Iの値と同じで『秒』という時間で設定でき、ヒータの性能によって短すぎると動作がおかしくなり、長すぎるとなかなか落ちてくるまで時間がかかってしまうというものとなってしまいます。
なので、これもI同様に素人がいじると動作をおかしくしてしまうものです。ですので、これまたうかつには設定としてはいじらないようにしましょう。
じゃあ、いじれないならどうすればいいの?
PIDのIとDはいじらない方がいいとお伝えしました。しかし、なかなかPだけいじっても動作がよくならない、なかなか安定しないということもあるでしょう。
そんなときに、オートチューニングという機能が、基本的に温度制御機器には搭載されています。
これが何かというと、自動的にPIDの値を算出してくれるものとなります。
どうしてそんなことができるのか?というと、目標設定値に対して温度の上りを機器側で見ながら収集し、最適値を出すという自動プログラムになっているからです。
ですので、オートチューニング中はわざと温度を上げたり下げたりしてヒータの温度上昇の性能を確認します。
それが完了するとコンピューター上の最適値となり、温度が安定しやすくなったり、安定するまでが早くなったりするんです。
ただし、コンピューターも完ぺきではありません。逆に動作が妙になってしまい、不都合が生じてしまうことがあります。
ですので、オートチューニング後は完全に信頼せずに一度動きを視認して確認した方が安全の為にいいでしょう。
 まとめ
まとめ
さて、PIDの基礎知識についてまとめてみました。
技術屋からすれば、これくらいは本当に基礎知識で、もっと深いものです。しかし、一般人への説明はこれで十分ではあります。
技術屋を目指すのであれば、さらなる勉強が必要ですが使用するだけであれば、最初はこれくらいの知識で問題ないかと思います。
これが参考になるのであれば幸いです。